P_onshape <<
Previous Next >> P_Control
P_webots
Webots 場景中的 hingejoint 是以機構的初始角度作為 0 度。
轉入 Webots 的 Plotter in Onshape 其機構初始設置為:
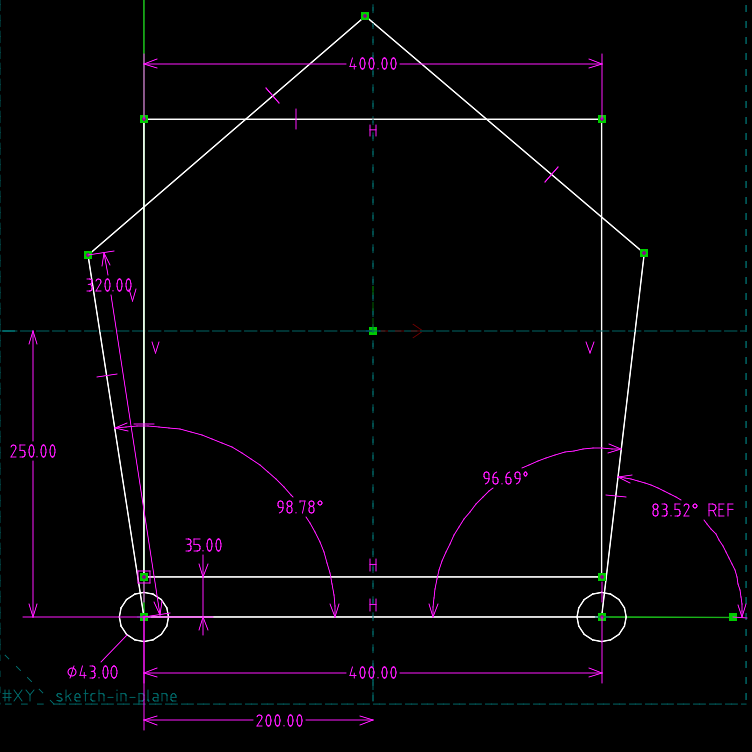
若以逆時針轉角為正, t1 必須反轉 8.78 度才能達到垂直的位置,而 t2 則必須正轉 6.69 度才能達到垂直的位置。
若兩個馬達都以水平線作為 0 度,則處了考慮從垂直角度位置,還必須逆轉 90 度才能到達水平的零點轉角位置。
此一角度座標定義,可以利用 webots_plotter_zero_degree.py 控制程式,讓兩個馬達的轉角設置在水平位置。
plotter_onshape_w4.7z
兩種建立剛體的方法 url 給定 OBJ 或 STL 檔案所在相對位置:
Solid - Shape - Mesh - url
CadShape - url
利用 boundingObject 界定物件碰撞檢測範圍:
boundingObject USE shape
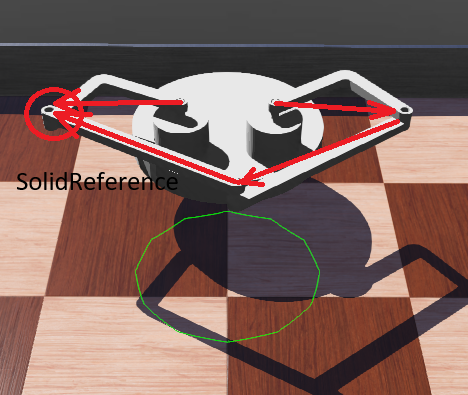
SolidReference 設定於 link3 端點,且參照 link4_solid,表示第四旋轉軸既位於 link3,同時也必須位於 link4,讓 Webots 透過此一 closed chain 約束條件,於系統方程式運算時,能夠模擬封閉連桿機構的運動。
從 Plotter in Onshape 以 STL 格式轉出後,利用 split_stl_to_obj_scale2_w_mtl.py,以兩倍原始尺寸分割零件為 OBJ 格式後,轉進 Webots 建立第一階段的模擬場景: 僅 link1 轉動: plotter_onshape_link1.7z
P_onshape <<
Previous Next >> P_Control