visionSensorPropertiesDialog <<
Previous Next >> forceSensorPropertiesDialog
forceSensors
|

Force sensors 
Force sensors are initially rigid links between two shapes that are able to measure transmitted forces and torques. The rigidity of force sensors is conditional, in the sense that force sensors can be broken if a certain condition arises (e.g. if a force or torque threshold is overshot). Following figure illustrates an application using a force sensor:
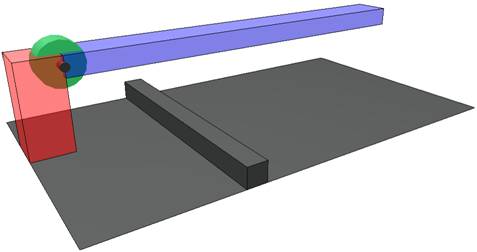
[Force sensor object (green) measuring the force and torque exerted by a beam (blue) anchored in a wall (red)]
A force sensor measures a pair of 3 values representing the force on the sensor along the x-, y- and z-axis, and the torque on the sensor about the x-, y- and z-axis:
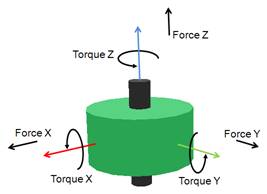
[Forces and torques measured by a force sensor]
Initially, a force sensor acts as a rigid link. During simulation, a force sensor can however be broken when a specified force/torque threshold is overshot or when some other user-defined conditions are met. Following figures illustrate the broken state of a force sensor:
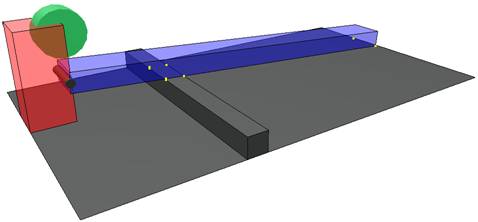
[Broken force sensor]
A force sensor is only operational during simulation if it is dynamically enabled. For more information on dynamically enabled force sensors, refer also to the section on designing dynamic simulations. Joints are also able to measure a force or a torque, however only along/about their z-axis.
Force sensors are added to the scene with [Menu bar --> Add --> Force sensor].
|
visionSensorPropertiesDialog <<
Previous Next >> forceSensorPropertiesDialog