|

Position dialog
The position dialog becomes visible when the object translation toolbar button is selected:

[Object translation toolbar button]
The dialog has four distinct tabs:
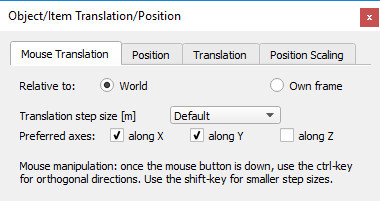
Mouse Translation
[Mouse translation tab]
In this section of the dialog, translation parameters of objects manipulated with the mouse can be set. See also the page on object movement via the mouse.
Relative to world/own frame: indicates that a mouse drag will translate the selected object on a plane or line that is aligned with the absolute reference frame, or aligned with the object's own reference frame.
Translation step size: the step size used when translating the selected object with a mouse drag (see the user settings dialog for default step sizes). Smaller step sized can still be used during manipulation by pressing the shift-key after the mouse button was pressed down.
Preferred axes: along X/ along Y/ along Z: indicates that a mouse drag allows translating the selected object along preferred axes of the reference frame selected above. Other axes can be used during manipulation by pressing the ctrl-key after the mouse button was pressed down.
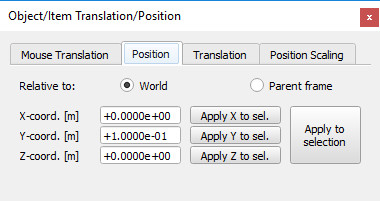
Position
[Position tab]
In this section of the dialog, precise positioning can be achieved on objects or items.
Relative to world/parent frame: indicates that the coordinates are relative to the absolute reference frame, or relative to the parent reference frame.
X-/ Y- / Z-coordinate: position of the selected object relative to the indicated reference frame (world or parent).
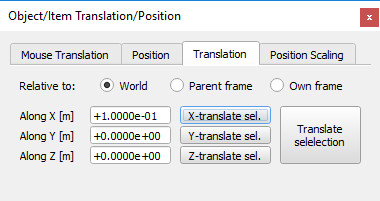
Translation
[Translation tab]
In this section of the dialog, precise object or item translation can be achieved.
Relative to world/parent frame/own frame: indicates that the translation will be relative to the absolute reference frame, relative to the parent reference frame, or relative to the object's own reference frame.
Translate along X / Y / Z: indicates the desired translation amounts along the x-, y- and z-axis of the indicated reference frame (world, parent or own frame).
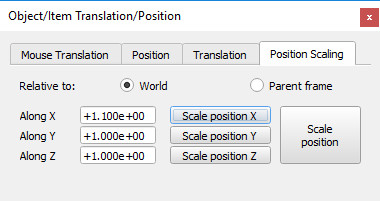
Position scaling
[Position scaling tab]
In this section of the dialog, precise scaling of object or item's position can be achieved.
Relative to world/parent frame: indicates that the position scaling will be relative to the absolute reference frame, or relative to the parent reference frame.
Scale along X / Y / Z: indicates the desired position scaling along the x-, y- and z-axis of the indicated reference frame (world or parent).
|