|

Model dialog
The properties of a model can be individually adjusted in the model dialog. It can be opened with a double-click on a model icon in the scene hierarchy:

[Model icon in the scene hierarchy]
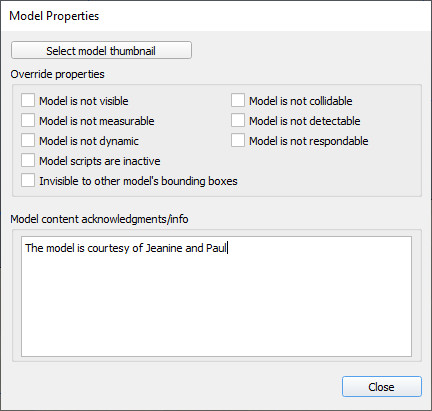
[Model dialog]
Select model thumbnail: when saving a model, a dialog pops open asking for a model thumbnail (that will be displayed in the model browser). If however you wish to save a thumbnail of your model in a different configuration (e.g. you wish to save a model of a snake robot in straight configuration, but you want the thumbnail to visualize the snake robot in a bent configuration), then you can specify the thumbnail here.
Override properties: here you can disable (override) specific properties for the whole model (i.e. for all objects in the model hierarchy tree). This is convenient to quickly disable a model that takes too much calculation time for instance. See also the sections on collidable objects, measurable objects and detectable objects, and the sim.setModelProperty API function.
Model content acknowledgments/Info: information related to a model. It is always good practice to acknowledge the original author of a model, or imported mesh. When a model that contains acknowledgment information is opened, it will automatically display that information.
|